
Trong các thử nghiệm có sự mô phỏng thực quản và dạ dày người, các nhà nghiên cứu đã tìm ra loại rôbốt được điều khiển bằng từ trường bên ngoài cơ thể có thể chui ra từ một viên nang và bò vào thành dạ dày để gắp những vật thể lạ bị nuốt vào dạ dày như pin hạt vá vết thương dạ dày..
Theo các tác giả từ Viện Công nghệ Massachusetts, loại rôbốt này mở ra hi vọng mới trong việc thực hiện những ứng dụng quan trọng để chăm sóc sức khỏe. Với các kỹ thuật thực hiện bên trong cơ thể, chúng ta cần một hệ thống rôbốt nhỏ, dễ kiểm soát và linh hoạt. Thực tế là khó để kiểm soát và đặt rôbốt vào trong cơ thể nếu rôbốt được gắn với dây buộc.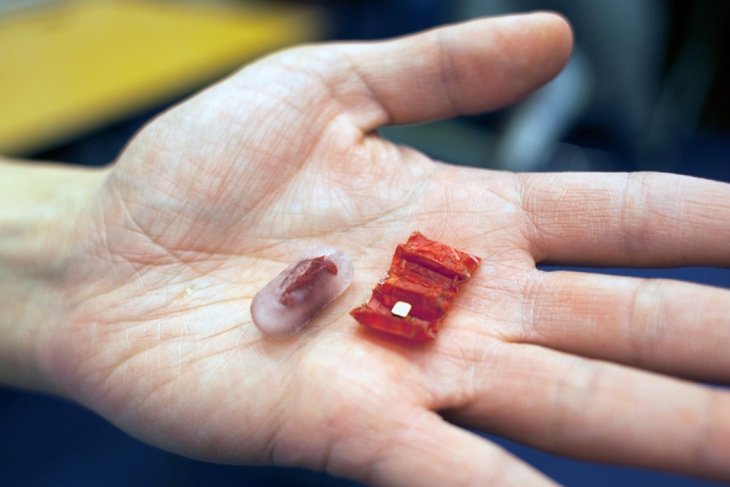
Mặc dù loại rôbốt này là một thế hệ mới của rôbốt được báo cáo trong hội thảo tương tự vào năm ngoái, thiết kế của nó có khác biệt đáng kể.
Việc sử dụng ảo ảnh của rôbốt cũng quyết định một loạt những thay đổi cấu trúc. Loại rôbốt mới này dựa trên vật liệu tương hợp sinh học.
Người ta cũng có thể nén rôbốt này đủ để nó vừa trong một viên nang uống, khi viên nang được hòa tan, các lực hoạt động trong rôbốt phải đủ mạnh để khiến nó thoát ra hoàn toàn.
Trong quá trình thiết kế, các nhà nghiên cứu đã tạo ra được một con rôbốt vuông góc với các nếp gấp tạo thành góc vuông với trục dài và kẹp chặt các góc đóng vai trò như các điểm của lực kéo. Ở giữa một trong những nếp gấp hướng về phía trước là một nam châm vĩnh cửu phản ứng với những thay đổi từ trường bên ngoài cơ thể, giúp kiểm soát hoạt động của rôbốt. Những lực này tác dụng lên rôbốt chủ yếu là luân phiên. Một vòng quay nhanh sẽ khiến nó đứng yên tại chỗ nhưng một vòng quay chậm hơn sẽ khiến nó quay quanh một trong những bàn chân cố định của nó.
Trong thử nghiệm này, rôbốt đã sử dụng nam châm tương tự để gắp các vật thể như pin hạt nút được nuốt vào dạ dày.
Phát hiện này dự kiến sẽ được trình bày tại Hội thảo quốc tế về Rôbốt và tự động hóa ở Stockholm, Thụy Điển.